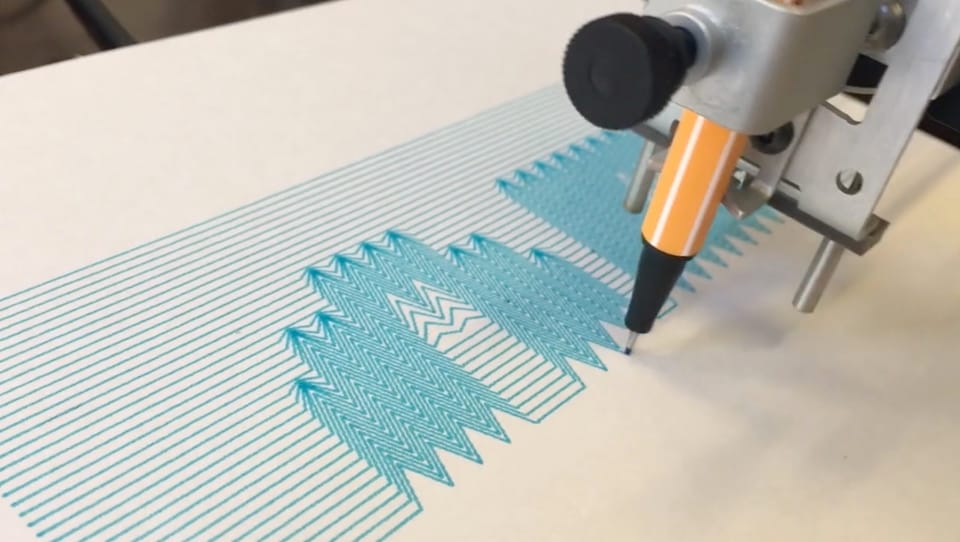
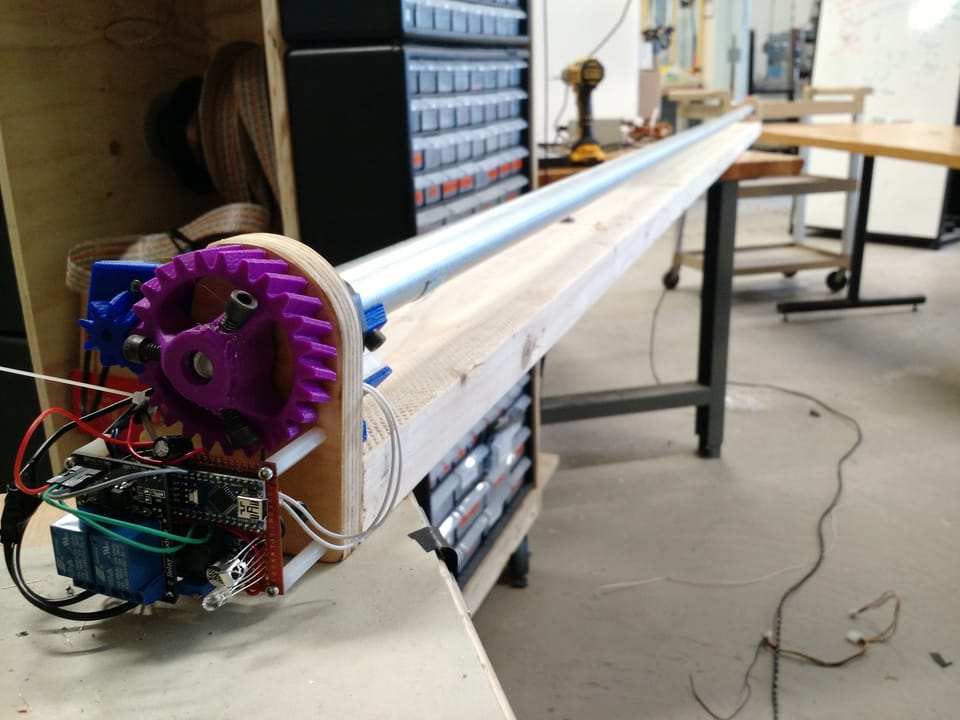
algorithms/programming Drawing Machine, with a Brain Drawing machines are a decent project to build from scratch, but they
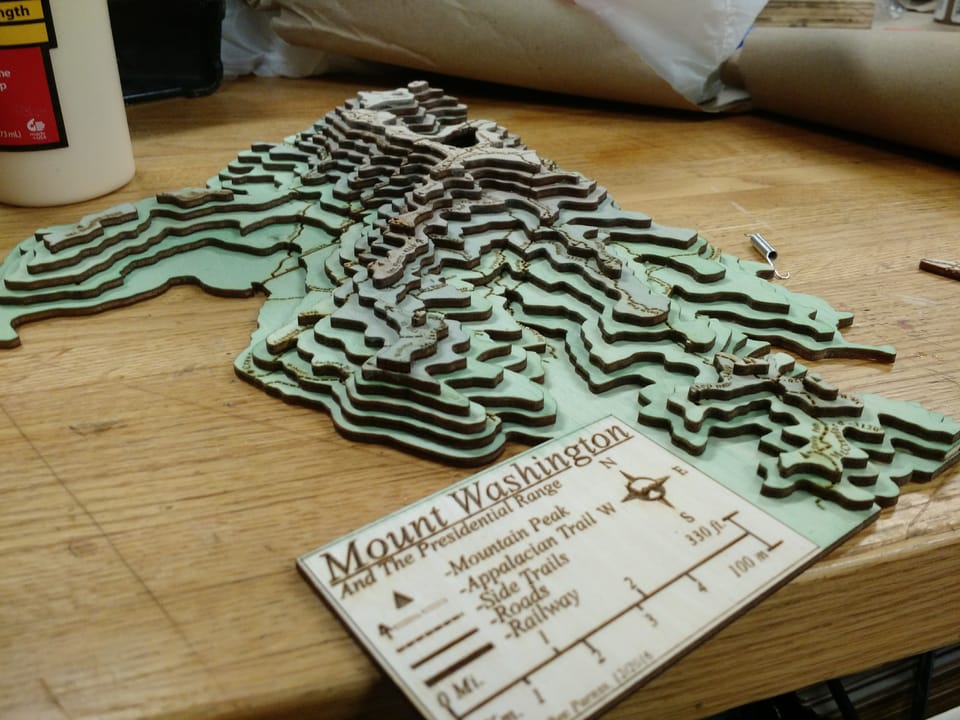
crafts/fun Creating New England's Monster, in TableTop Form As an outdoors enthusiast, I'm pretty fond of topographic maps.
algorithms/programming TigerBug: What's your vector, Victor? This is part of TigerBug, a robot design I am working on
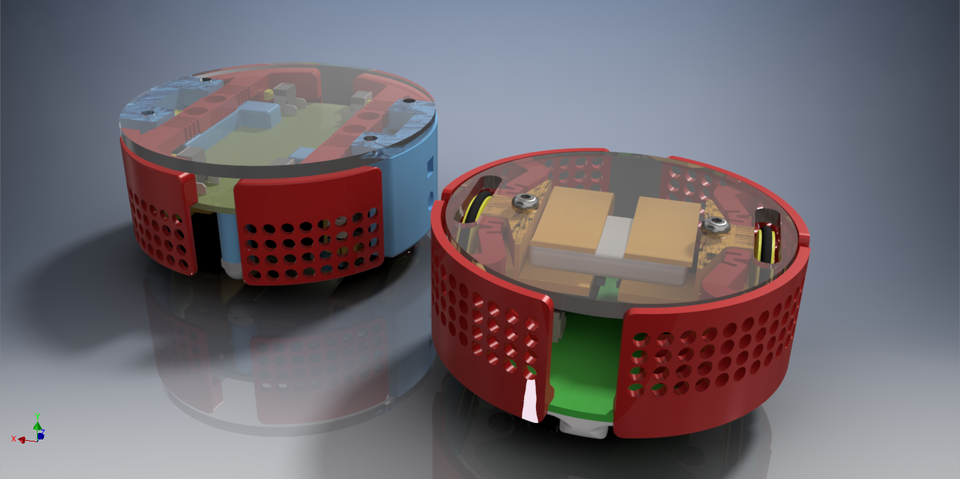
rapid prototyping TigerBug: Mechanical machinations This is part of TigerBug, a robot design I am working on
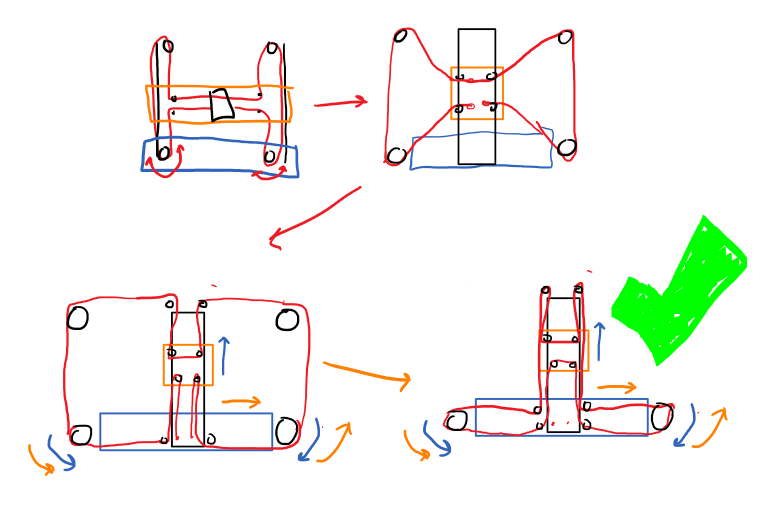
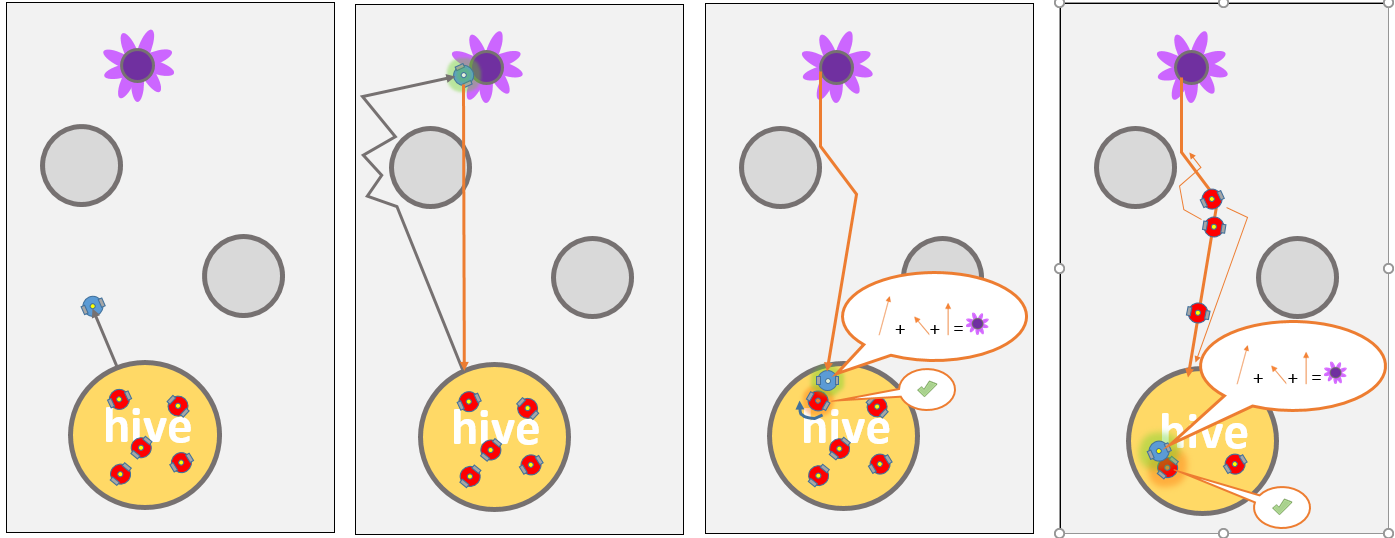
algorithms/programming TigerBu(zz): The Simulation This is part of TigerBug, a robot design I am working on
Construct Project: Improving An Amazing, but Flawed Large-Format 3D Printer Construct Projects are things that I have worked on while employed at
Construct Project: Projector Screen on the Cheap Construct Projects are things that I have worked on while employed at
rapid prototyping Modifying a 40 year old bicycle to support sequential shifting I have a 1970s vintage Raleigh Grand Prix, which I used to
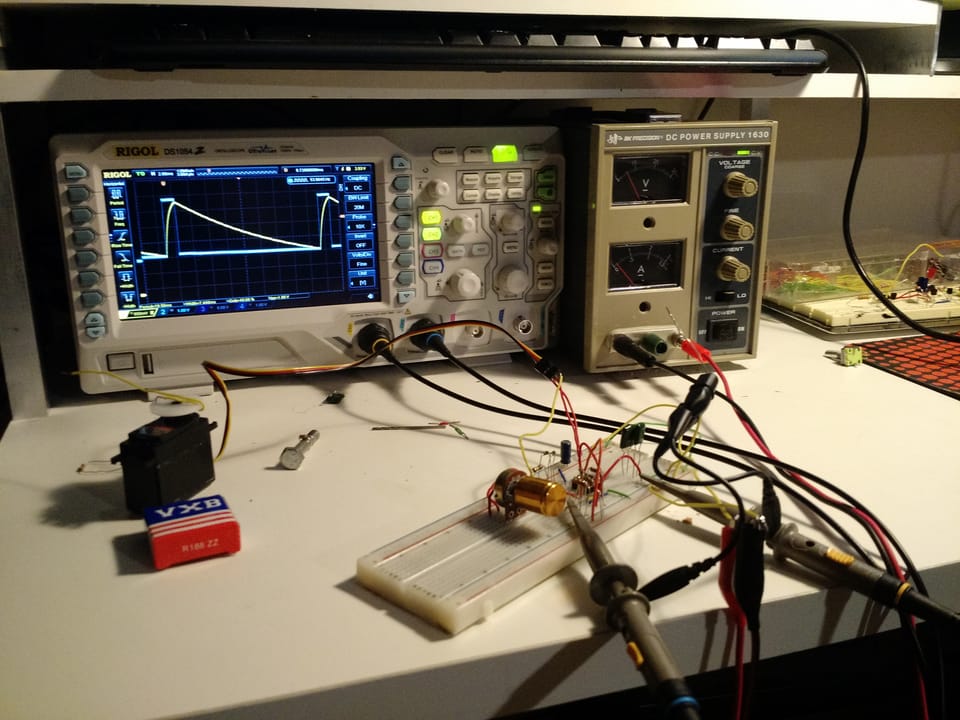
electronics Analog PWM generator I was watching a video by W2aew about creating a stair-stepping circuit