Sustainability Reframing the Rental Exploring various furniture designs and augmenting the dated layouts of a fixed living space.
algorithms/programming Global Shift in Climactic Regime A tale of free airline wifi, a burning question about our changing climate, and (eventually) a reasoned approach to answering it.
crafts/fun From Workbench, to Work-from-Home A brief introduction to Brazing, and quips about the prospects of sustainable
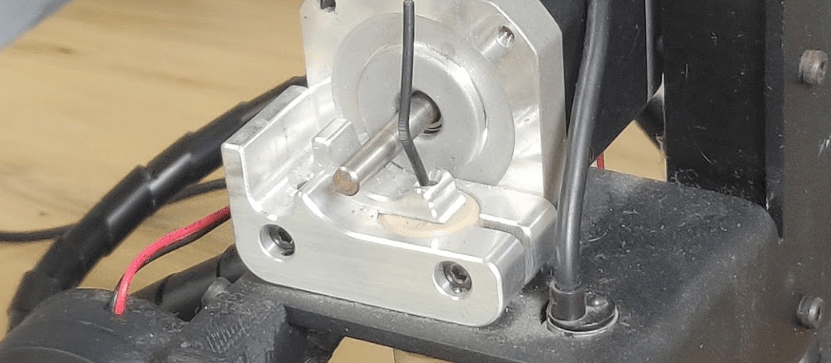
rapid prototyping Sustaining Engineering on an Older FDM A short repair/modification to an aging 3D printer, and a mystery solved.
Constructing the Indestructible Not contained within this blog post: thoughts about the CoVID-19 pandemic, Excuses
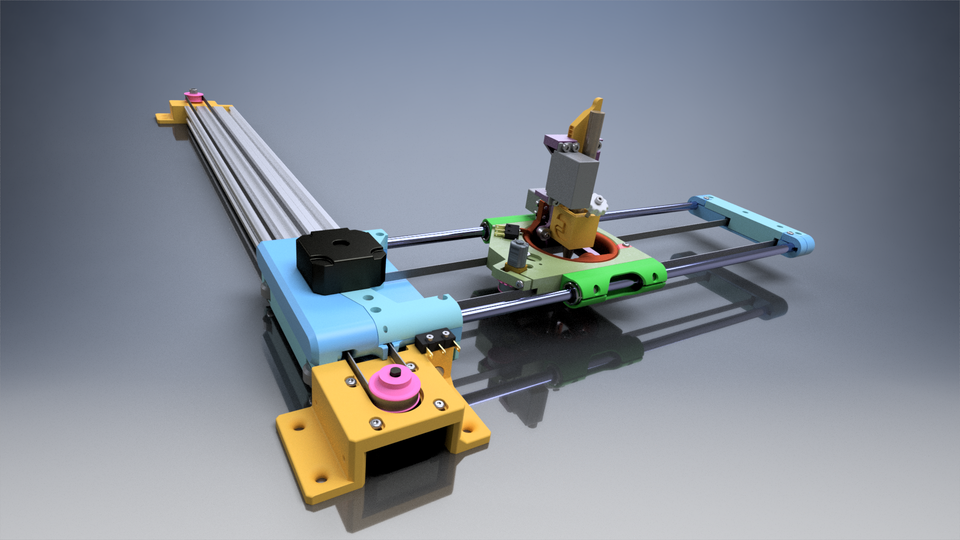
A Scaled-up Form 2 Print Engine, Using Giant Galvanometers Some time after finding the camera from my last post, I found
crafts/fun Brightening my DayLilies April was a tricky month. Formlabs is bustling; we announced a big
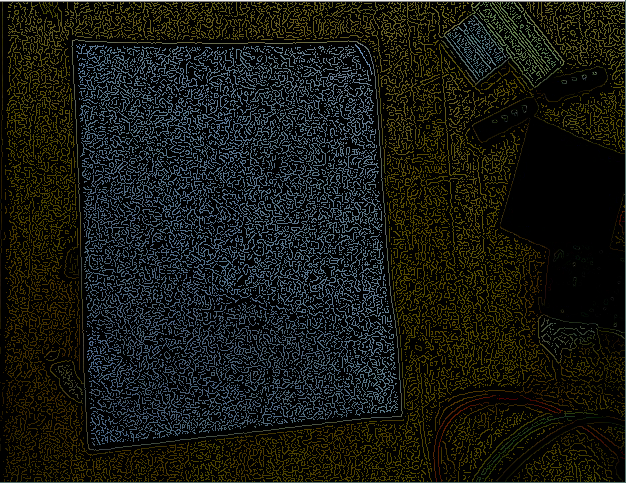
algorithms/programming Detecting Edges of Objects using OpenCV I've been starting to explore different methods for figuring out